
 服務(wù)熱線
服務(wù)熱線聯(lián)系我們
Contact Us公司總機(jī):020-8998-6280
技術(shù)熱線:020-3893-9734
技術(shù)郵箱:support@tronlong.com
銷售郵箱:sales@tronlong.com
一文讀懂ROS開發(fā),解鎖RK3562J + Ubuntu工業(yè)平臺應(yīng)用
2025/01/07
在工業(yè)智能化浪潮中,智能機(jī)器人設(shè)備是成為工業(yè)自動化體系的璀璨之星,而其核心 ——ROS系統(tǒng),更是機(jī)器人領(lǐng)域的集大成者。今天,和大家分享一個ROS開發(fā)案例,基于RK3562J + Ubuntu工業(yè)平臺。
ROS系統(tǒng)簡介

隨著工業(yè)智能化的快速發(fā)展,智能機(jī)器人設(shè)備已成為工業(yè)自動化體系的佼佼者,而智能機(jī)器人設(shè)備核心—ROS系統(tǒng),是機(jī)器人領(lǐng)域的集大成者,主要應(yīng)用于機(jī)器人控制領(lǐng)域,如AGV工業(yè)機(jī)器人控制器、智能機(jī)械臂控制器、機(jī)器人導(dǎo)航系統(tǒng)等。
ROS系統(tǒng)主要特點
豐富的機(jī)器人算法庫
開源免費,架構(gòu)精簡
實時通信,安全可靠

圖 2
RK3562J典型應(yīng)用領(lǐng)域

圖 3
RK3562J + Ubuntu的ROS2系統(tǒng)演示案例
硬件平臺:創(chuàng)龍科技TL3562-EVM工業(yè)評估板(基于RK3562J)
為了簡化描述,本文僅摘錄部分方案功能描述與測試結(jié)果,詳細(xì)產(chǎn)品資料請掃描文末二維碼下載。
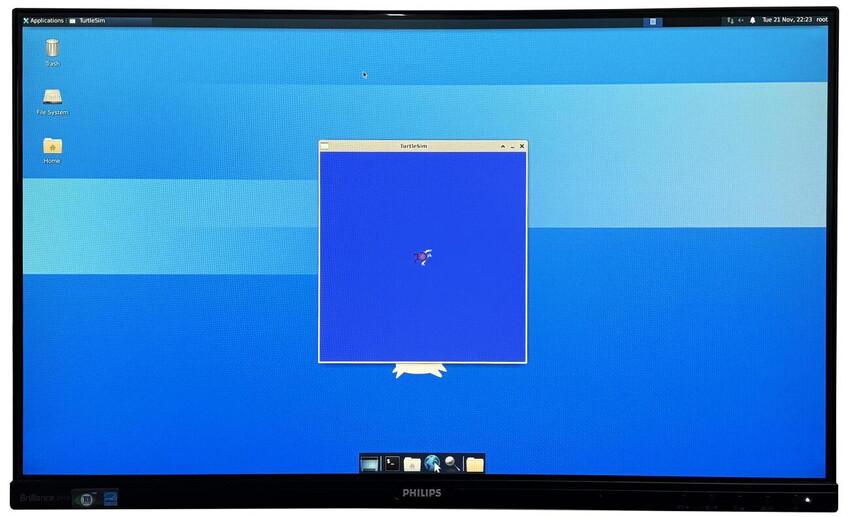
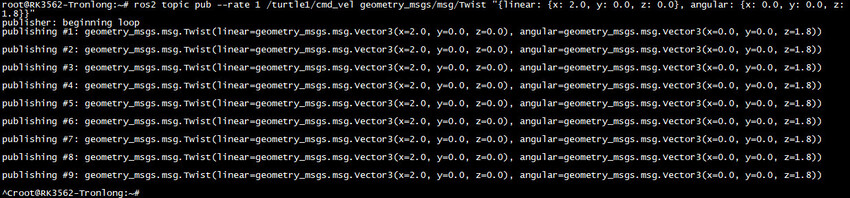
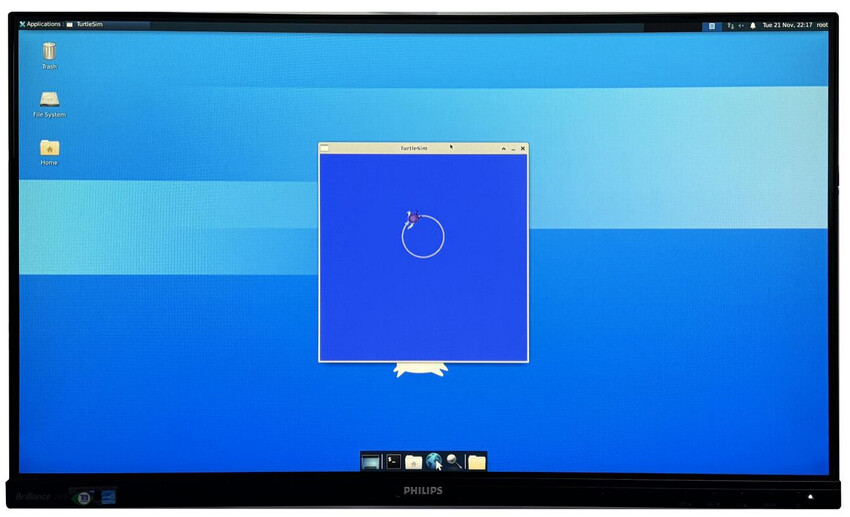
turtlesim(小海龜)測試

圖 4
如果各位工程師想要查看更多RK3562J相關(guān)的案例演示,只需掃描下方二維碼下載,快來開啟探索之旅吧!

更多RK3562J工業(yè)核心板產(chǎn)品資料可長按二維碼識別下載

亦可添加添加客服人員微信進(jìn)行咨詢

(即刻添加,馬上咨詢)
